


Учебные проекты 2024/2025
Общая информация
Проектно-учебная лаборатория робототехники ФКН объединяет энтузиастов ФКН, которые хотят попробовать свои силы в создании реальных роботов. Мы решаем широкий спектр задач: от разработки механики и электроники до создания программного обеспечения для уже существующих роботов.
В этом учебном году мы предлагаем студентам ФКН большой набор тем проектов для написания курсовой или дипломной работы. Набор на проекты будет проходить через онлайн собеседования с целью узнать о вашем опыте и интересах. При успешной работе над проектом, мы будем готовы предложить вам вакансию в нашей лаборатории.
Контакты для связи: @apmilko (Андрей Милько).

Как к нам попасть
Процесс подачи заявки:
- ознакомиться с темами проектов
- заполнить форму
- пройти собеседование
Дедлай отбора на проекты: 1 ноября 2024.
Темы проектов
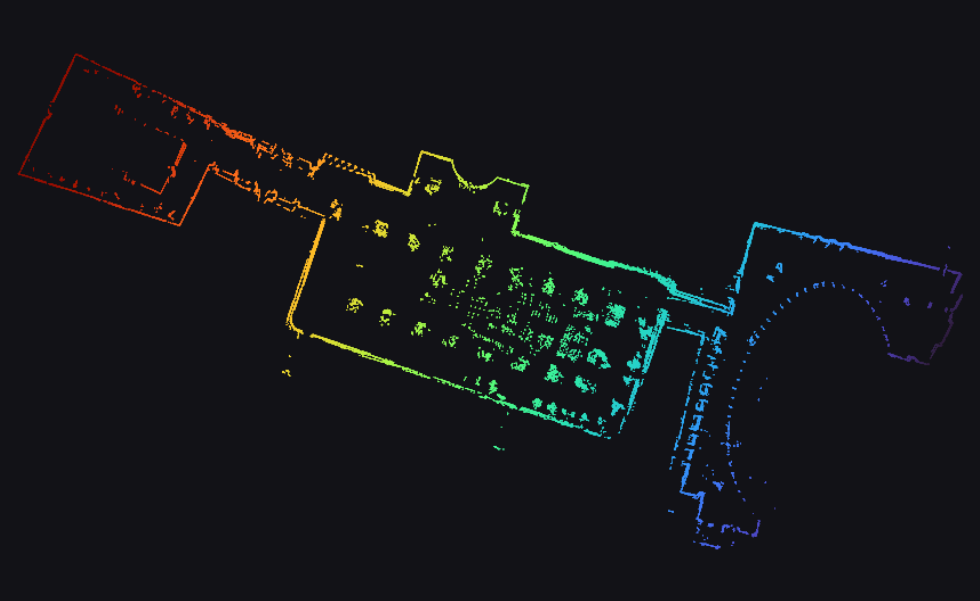
1. (Truck) Построение 3D лидарной карты помещения для автономного мобильного робота
Аннотация
Группа робототехники работает над автономным мобильным роботом (презентация). Для построения маршрута и локализации в пространстве роботу необходима карта местности. В рамках данного проекта необходимо построить ICP карту для основе облаков 3D лидара (Livox Mid-360), используя текущие наработки группы (демо).
Цель
Построение 3D лидарной карты помещения для локализации и навигации автономного мобильного робота.
Задачи:
- Знакомство с алгоритмом ICP (библиотека Libpointmatcher) и графовой оптимизацией (библиотека g2o)
- Перенос существующего решения на 3D лидар
- Настройка параметров построения карты
- Тестирование алгоритма лидарной локализации в симуляторе и в реальности
Требования, предъявляемые к студентам:
- Проект требует регулярной работы в течении учебного года и предполагает большую нагрузку (чекпоинты каждую 1-2 недели)
- Знакомство с численными методами оптимизации, готовность изучать статьи и соответствующую литературу на английском
- Уверенное владение С++ (процесс код ревью обязателен)
- Будет плюсом знание алгоритмов ICP, MVG, SfM или опыт работы с PCL
2. (CartPole) RL модель для установки CartPole

Аннотация
CartPole — классическая задача управления, также известная как “Inverted Pendulum”. Свободно подвешенный маятник закреплен на каретке, которая двигается по линейной направляющей. Управляя только ускорением каретки необходимо перевести маятник в верхнее неустойчивое положение равновесия и удерживать там (видео). Подробнее о нашем опыте разработки можно почитать здесь.
Цель
Обучить модель управления CartPole, используя DDPG или SAC подход из Reinforcement Learning. Адаптировать модель для запуска на реальном устройстве.
Задачи:
- Познакомиться с текущим симулятором CartPole
- Выбрать интересующий вас модель и обучить ее в симуляторе
- Сделать трансфер модели на реальное устройство
Требования, предъявляемые к студентам:
- Проект требует регулярной работы в течении учебного года и предполагает большую нагрузку (чекпоинты каждую 1-2 недели)
- Знание базовых методов обучения NN моделей. Опыт работы с pytorch
- Желателен опыт с обучение RL моделей в симуляции
- Большим плюсом будет знание азов оптимального управления
3. (Truck) Сегментация 3D лидарного облака для автономного мобильного робота

Аннотация
В этом учебном году группа хочется сфокусироваться на MVP системы восприятия статичных препятствий и динамических агентов. Для этого до НГ мы хотим получить минимальный датасет для задачи сегментации 3D лидарного облака, а затем обучить легковесную модель, которая будет делать сегментации для Bird’s Eye View (BEV) представления лидарного облака. В качественной отправной точки предлагается использовать модель MMDetection3D.
Цель
Получить минимальный датасет для задачи сегментации 3D лидарного облака и обучить готовую архитектуру для 3D сегментации.
Задачи:
- Запись датасета с лидарным облаком точек + фотографии/видео объектов вокруг машинки для удобства разметки
- Разметка датасета под задачи сегментации и детекции
- Реализация и обучение модели PointPillars (статья)
- Реализовать и обучить базовую модель с головой SSD (mmdetection3d)
- Реализовать и обучить базовую модель с головой U-Net
- Обучение моделей с головами на современных детекторах
- Запуск модели на вычислителе NVidia Orin AGX на роботе
- Оптимизация инференса через TensorRT (подробнее)
Требования, предъявляемые к студентам:
- Проект требует регулярной работы в течении учебного года и предполагает большую нагрузку (чекпоинты каждую 1-2 недели)
- Уверенное знание python + pytorch (будет плюсом опыт с mmdetection3d)
- Опыт работы с computer vision: задачи детекции и сегментации, будет плюсом опыт c multi-view geometry
- Будем плюсом опыт сбора и разметки собственных датасетов
- Будет плюсом опыт внедрения моделей и настройки эффективного инференса (ONNX, TensorRT, NVidia APIs)
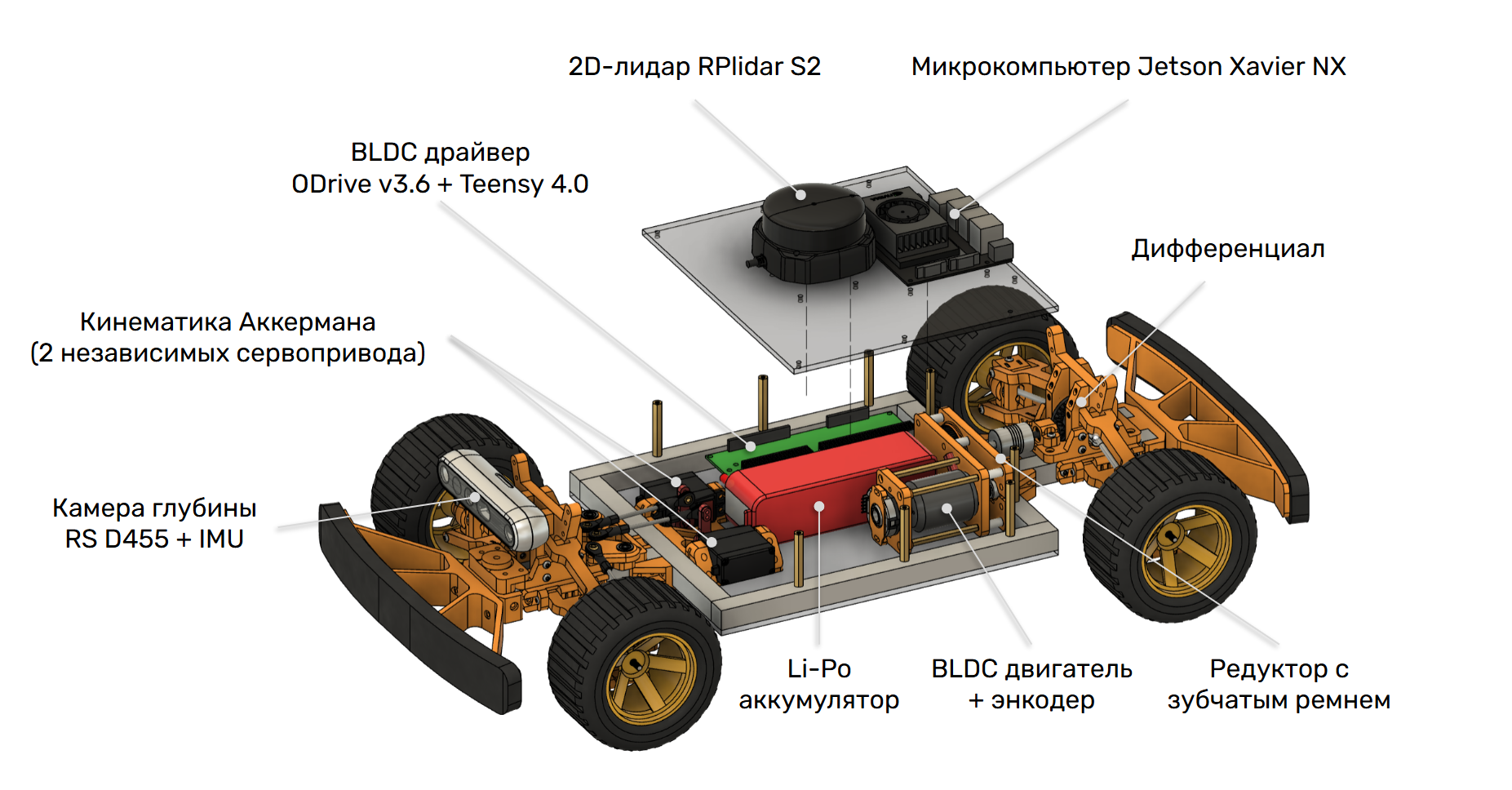
4. (Truck) Разработка аппаратной платформы мобильного робота
Аннотация
Группа робототехники работает над автономным мобильным роботом (презентация). В текущем учебном году планируется разработка второй версии аппаратной части (механика + электроника). Есть ряд прикладных и исследовательских задач, связанных с программированием микроконтроллеров семейств STM32 и ESP32, управлением BLDC двигателями в режиме position/velocity/torque control, изучением новых датчиков, разработкой печатных плат (PCB) и т.д. Мы готовы пригласить студентов у которых уже есть опыт работы в этой сфере, и предложить много интересных задач.
Цель
Разработать прототип новой аппаратной платформы для мобильного робота.
Задачи:
По результатам собеседования.
Требования, предъявляемые к студентам:
- Базовые знания C/C++
- Базовые знания схемотехники и принципов цифровой электроники
- Опыт программирования микроконтроллеров
- Будет плюсом опыт с платформой STM32
- Будет плюсом опыт 3D-моделирования (CAD) и 3D-печати
- Проект требует регулярной работы в течении учебного года и предполагает большую нагрузку (чекпоинты каждую 1-2 недели)
![]()
Нашли опечатку?
Выделите её, нажмите Ctrl+Enter и отправьте нам уведомление. Спасибо за участие!
Сервис предназначен только для отправки сообщений об орфографических и пунктуационных ошибках.