
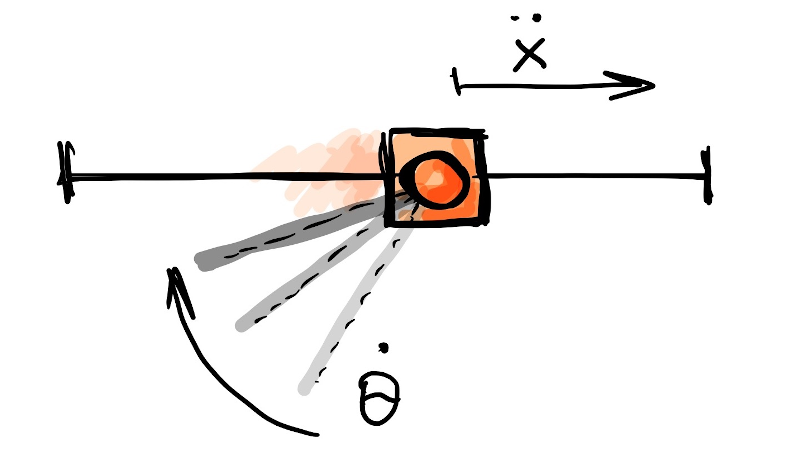
CartPole
CartPole — проект, с которого стартовала работа лаборатории, как классической задачи управления. Есть каретка, движущаяся вдоль горизонтальной направляющей, к ней крепится свободно подвешенный маятник в виде металлического стрежня. Управляя только ускорением каретки, необходимо перевести маятник в верхнее неустойчивое положение равновесия и там удерживать. В данный момент мы активно работаем над линейной и радиальной версиями устройства. Главная цель проекта – иметь тестовый полигон для обкатки алгоритмов отптимального управления и RL обучения моделей, способных управлять сложными динамическими системами. Подробнее о нашем опыте разработки можно почитать здесь.


![]()
Нашли опечатку?
Выделите её, нажмите Ctrl+Enter и отправьте нам уведомление. Спасибо за участие!
Сервис предназначен только для отправки сообщений об орфографических и пунктуационных ошибках.