Позиционирование и предсказание траектории мячика для настольного тенниса с помощью массива камер
Выполнили: Бакин Денис Филиппович, Палеев Даниил Алексеевич
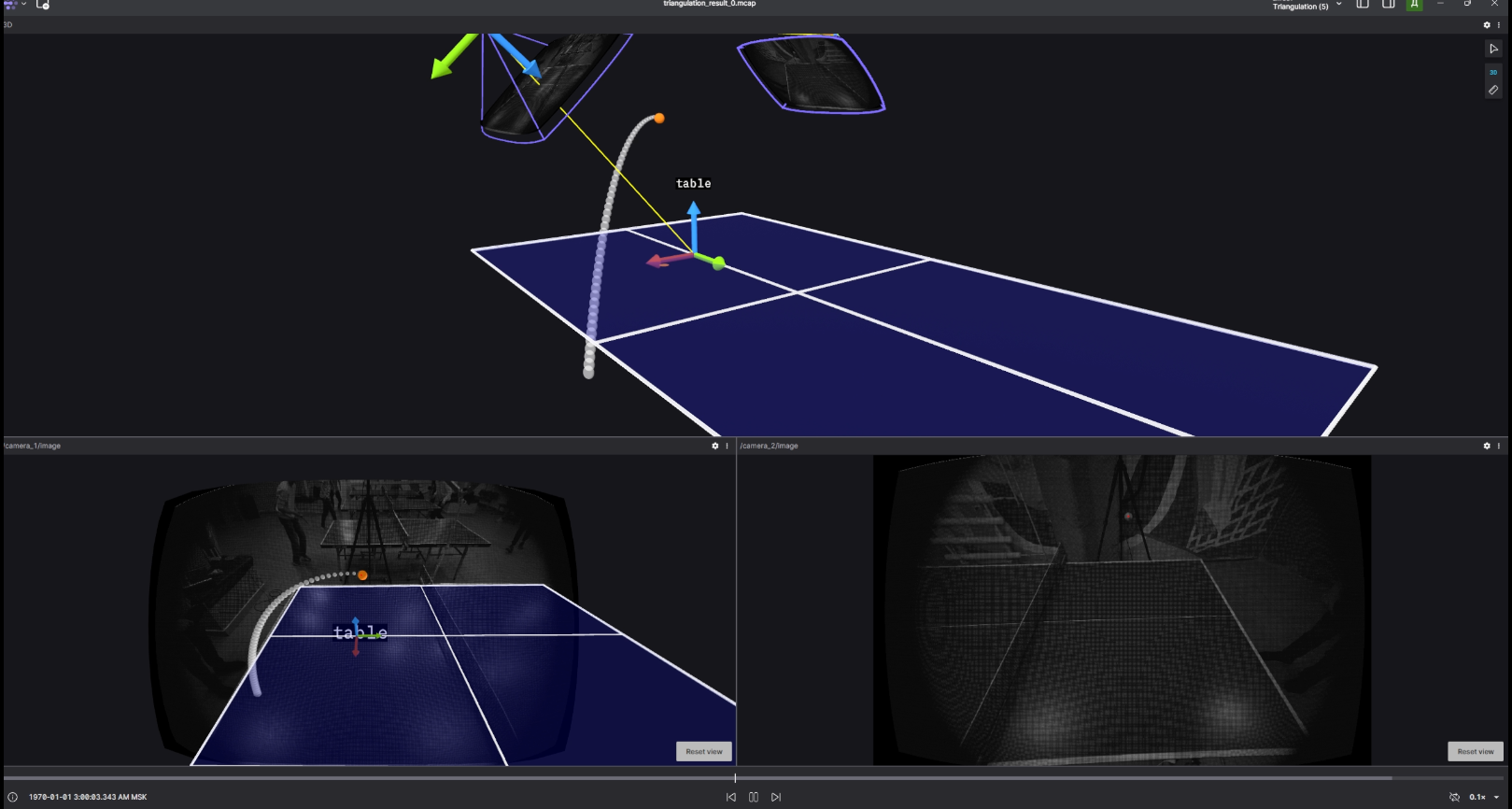
This work, part of the HSE Robotics Group's “Handy” project, aims to enable a robot to play table tennis by researching, implementing, and validating ball positioning and tracking in a high-frequency robotics system. This paper focuses on the process of triangulation and camera calibration, excluding image segmentation and machine learning details.
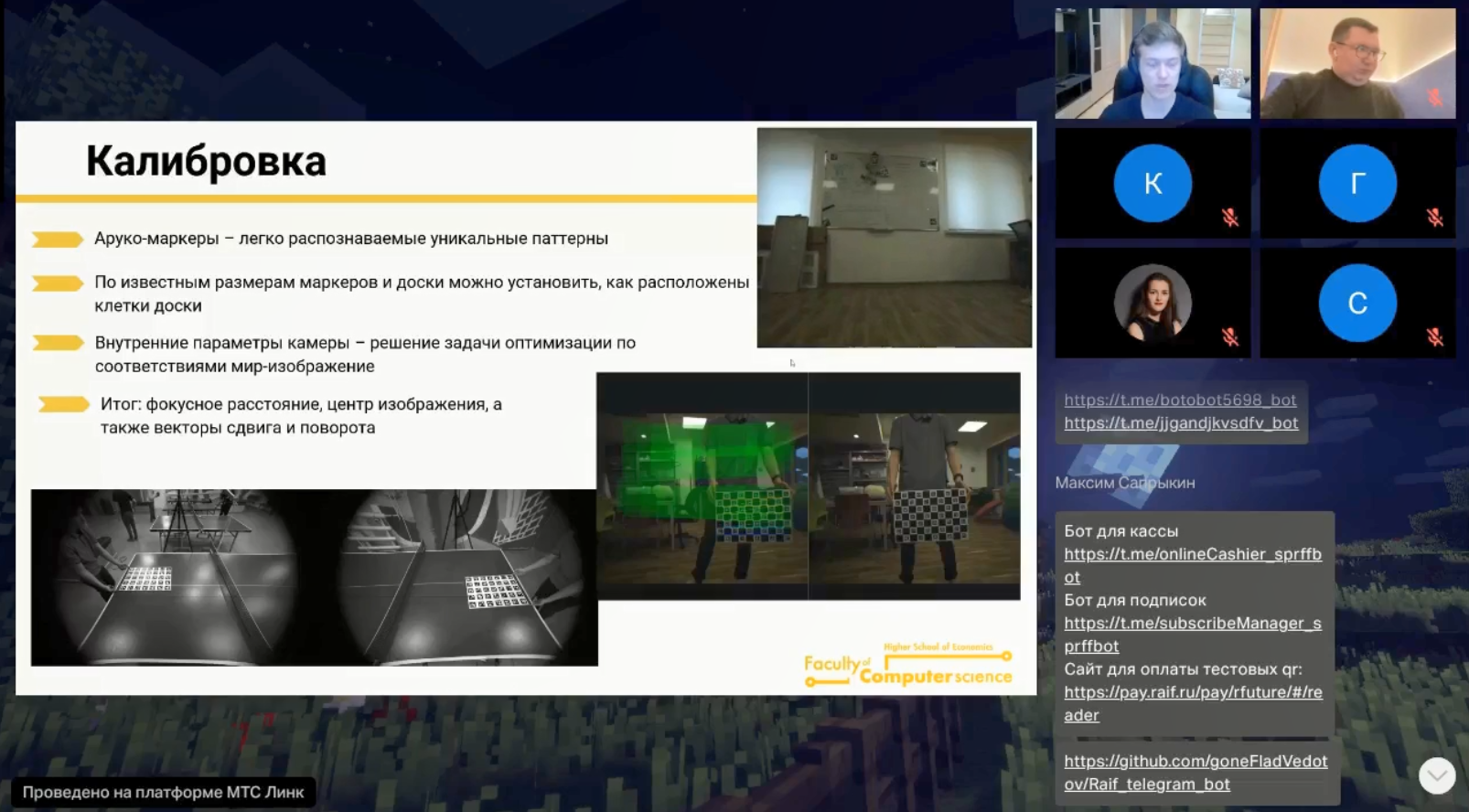
The robot must quickly locate the ball's precise position, achieved by combining segmentation results from multiple views and triangulating the position. Camera calibration is necessary to obtain intrinsic parameters for calculations.
The project outlines the theory and motivation behind selected methods, and compares precision among various triangulation methods.
Демонстрация проекта
Запись защиты
Итоговый отчет
Ссылка на репозиторий на GitHub
Руководители проекта

Факультет компьютерных наук: Руководитель проекта

Департамент больших данных и информационного поиска: Доцент
![]()
Нашли опечатку?
Выделите её, нажмите Ctrl+Enter и отправьте нам уведомление. Спасибо за участие!
Сервис предназначен только для отправки сообщений об орфографических и пунктуационных ошибках.