


Практика 2023
Приглашаем студентов принять участие в летней практике от группы робототехники. С любыми вопросами можете писать в телеграм @dasimagin или @andbondstyle, также можете посетить наш канал в телеграме и на youtube, чтобы быть в курсе последних новостей. Набор на практику будет проходить через небольшое собеседование с целью познакомиться друг с другом. Условия и сроки обговариваются индивидуально, ориентируйтесь на то, что практика займет не меньше 3 недель, с регулярным очными посещениями корпуса на Покровке. Практика может перерасти в курсовую или учебный проект.
CartPole
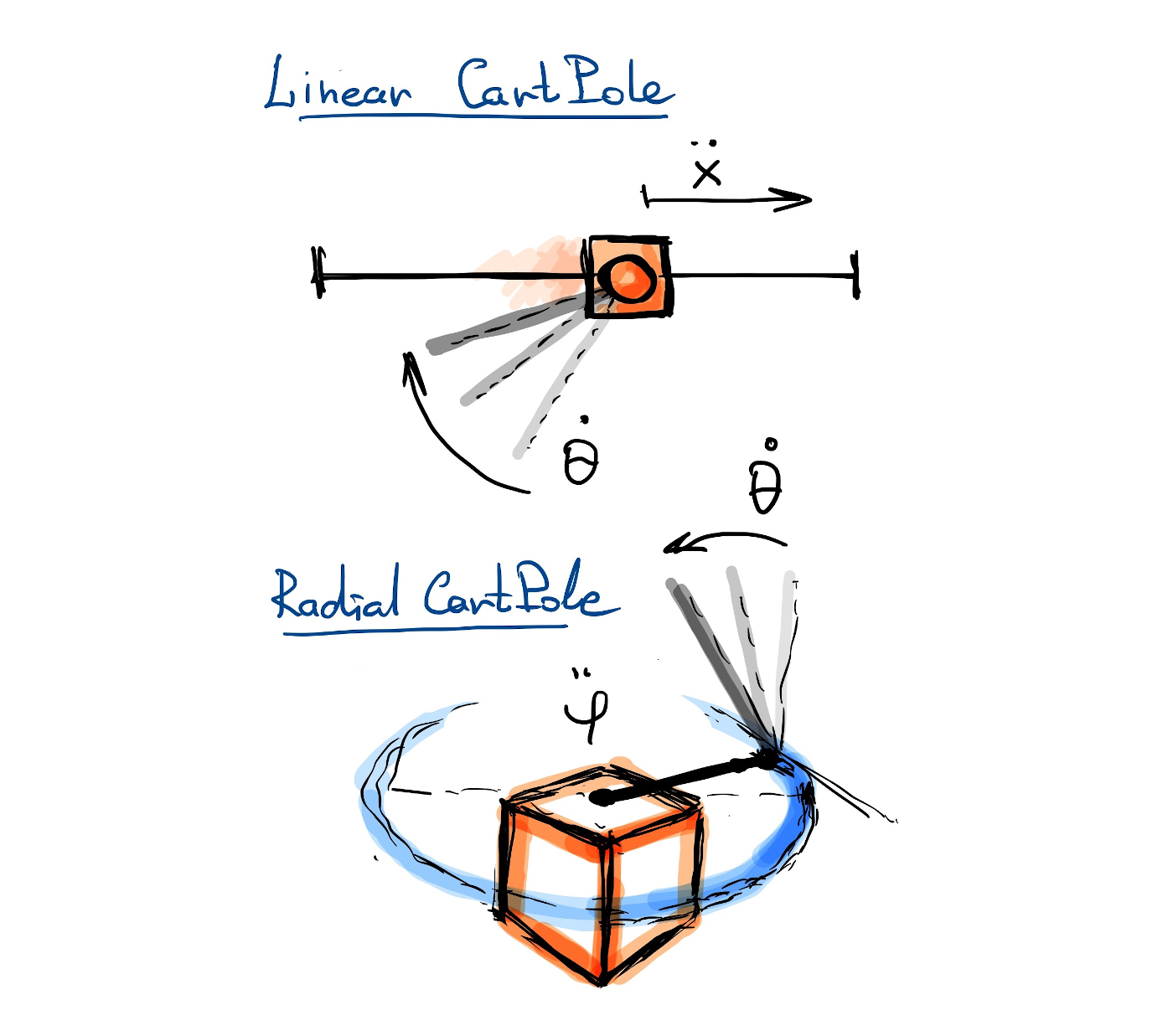
CartPole — классическая задача управления, также известная как “Inverted Pendulum”. Каретка двигается вдоль направляющей со свободно подвешенным к ней маятником. Управляя только ускорением каретки необходимо перевести маятник в верхнее неустойчивое положение равновесия и удерживать там. Вот так это выглядит для линейной и радиальной версии устройства. Подробнее о проекте можно почитать здесь.
В рамках летней практики мы предлагаем студентам обучить модель, управляющую CartPole, используя DDPG подход из Reinforcement Learning. Для экспериментов будут предоставлены две версии устройства с API на Python и физическим симулятором для обучения.
Truck
Lidar Map
В рамках проекта модели машинки с автопилотом нам необходимо научиться записывать лидарные карты помещений, чтобы в дальнейшем уметь локализовываться и строить долгосрочные маршруты. Для этого необходимо произвести запись помещения 2D лидаром, а затем построить на основе этих данных карту. Векторизацию предлагается делать вручную, отрисовкой доступных роботу полигонов в виде GeoJSON.
Motion Planning
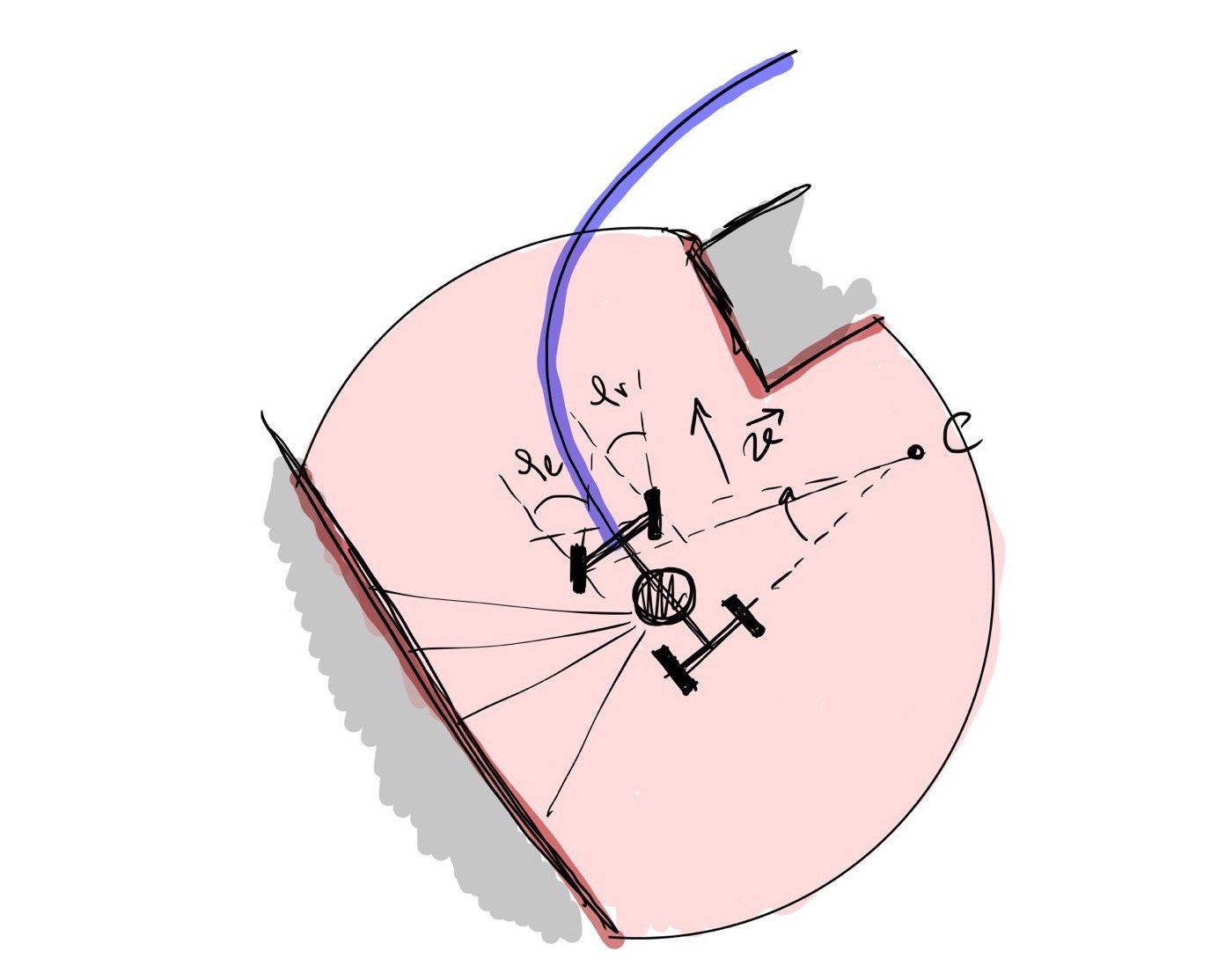
Мы активно делаем геометрический планер для беспилотной машинки, и вы можете присоединиться к изучению подходов планирования движения и поучаствовать в разработке. В ходе работы предстоит изучить теорию, познакомиться с фреймворком ROS2 и внести вклад в кодовую базу на C++. Тестирование будет происходить сначала в физическом симуляторе, а затем на реальном роботе.
FastSim2D
Для экспериментов с обучением RL моделей необходимо иметь простой и очень быстрый 2D симулятор. Карту препятствий можно представлять в виде бинарного изображения (по нему можно генерировать лидарные лучи), а движение машины будет происходить по кинематике Аккермана. Симулятор должен обладать удобным C++ и Python API для интеграции в проект.
Mr. Handy
Ball Tracker
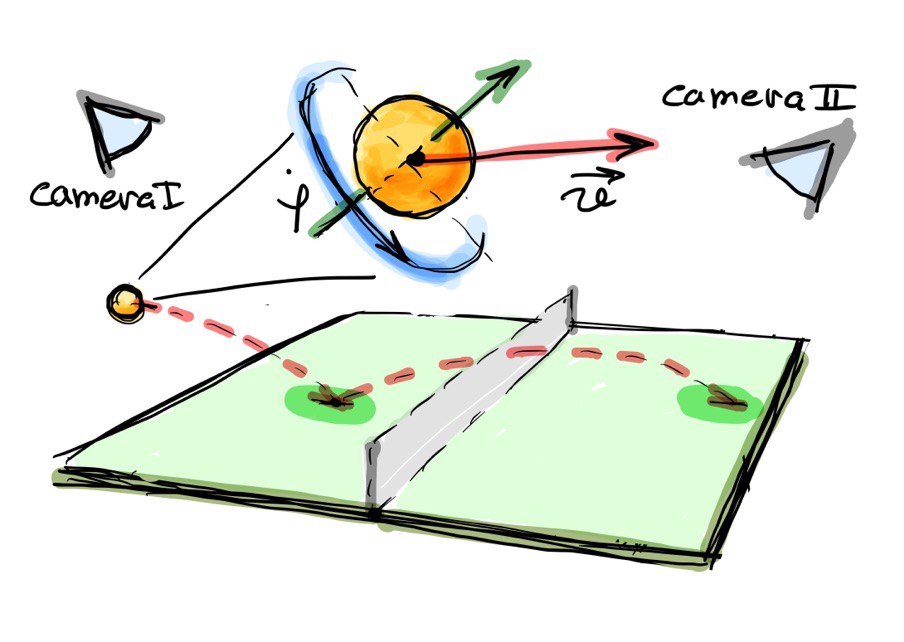
В рамках реализации робота, способного играть в пинг-понг, мы разрабатываем трекер мячика, который на основе массива камер производит отслеживание и позиционирование мяча в пространстве с частотой 100Hz, а также делает предсказание дальнейшего полета на основе физической модели с учетом спина, отскока от поверхности и прочих физический параметров.
Motion Simulation
Проработку планировщика траектории для пинг-понга мы хотим начать с этапа симуляции манипулятора. В рамках практики студенту будет предложено изучить лежащую в основе физику, познакомиться c популярными кинематическими схемами манипуляторов и реализовать параметризованную модель в симуляторе (Gazebo11 или PyBullet) с удобным API для управления. В дальнейшем работа может перерасти в курсовую по планированию траектории манипулятора для игры в пинг-понг.
Whiteboard Bot

Наш первый прикладной проект — это робот, способный стирать с маркерной доски. В данный момент мы имеем эвристический алгоритм сегментации и локализацию уголков доски по aruco маркерам. В рамках летней практики мы хотим предложить вам обучить модель для определения границ доски и определения областей с надписью. Для этого потребуется самостоятельно собрать и разметить датасет. Развивать проект в дальнейшем можно в рамках курсовой.
MCU & Electronics
Роботов без электроники не бывает, поэтому данное направление распространяется на все наши проекты. Есть ряд прикладных и исследовательских задач, связанных с программированием микроконтроллеров семейств STM и ESP, управлением BLDC моторами в режиме position/velocity/torque control, изучением новых датчиков, разработкой печатных плат (PCB) и т.д. Мы готовы пригласить студентов, у которых уже есть опыт работы в этой сфере, и предложить много интересных задач. На картинке ниже — драфт новой архитектуры электроники для проекта truck в качестве примера.
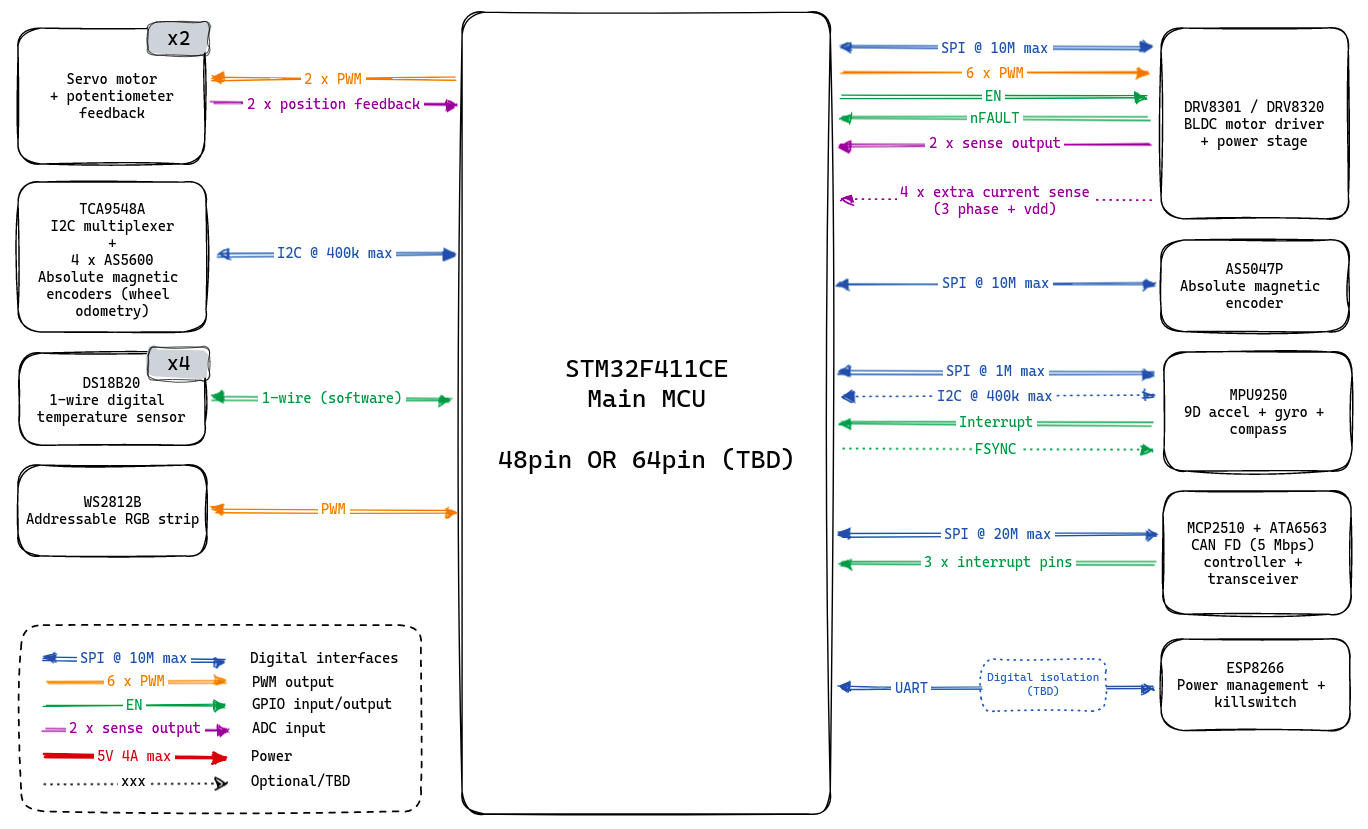
![]()
Нашли опечатку?
Выделите её, нажмите Ctrl+Enter и отправьте нам уведомление. Спасибо за участие!
Сервис предназначен только для отправки сообщений об орфографических и пунктуационных ошибках.